
麦克纳姆轮的技术应用
在竞赛机器人和特殊工种机器人设计中,全向移动往往是一个必需的功能。“全向移动”意味着可以在平面内做出任意方向平移同时自转的动作。为了实现全向移动,一般机器人会使用全向轮(Omni Wheel)或麦克纳姆轮(以下简称麦轮)(Mecanum Wheel)这两种特殊轮子。
区别于全向轮对轮与轴之间角度的特殊要求,麦轮可以像传统轮子一样,安装在相互平行的轴上,这使其近年在Robocon、FRC 等机器人赛事中得到广泛应用。同样其外观表现出来的“酷炫狂拽”,也是它在应用方面越来越火爆的重要因素。
原理简介
麦克纳姆轮,是瑞典麦克纳姆公司的设计作品。简单来说就是在中心轮圆周方向又布置了一圈独立的、倾斜角度(45°)的行星轮。
通过高中知识我们知道,速度可以分解为x、y两个方向。麦克纳姆轮的全向移动正是基于这一原理。
下面我们将以图解的方式介绍其原理。
如图是简单的前后移动(默认横向为x向)
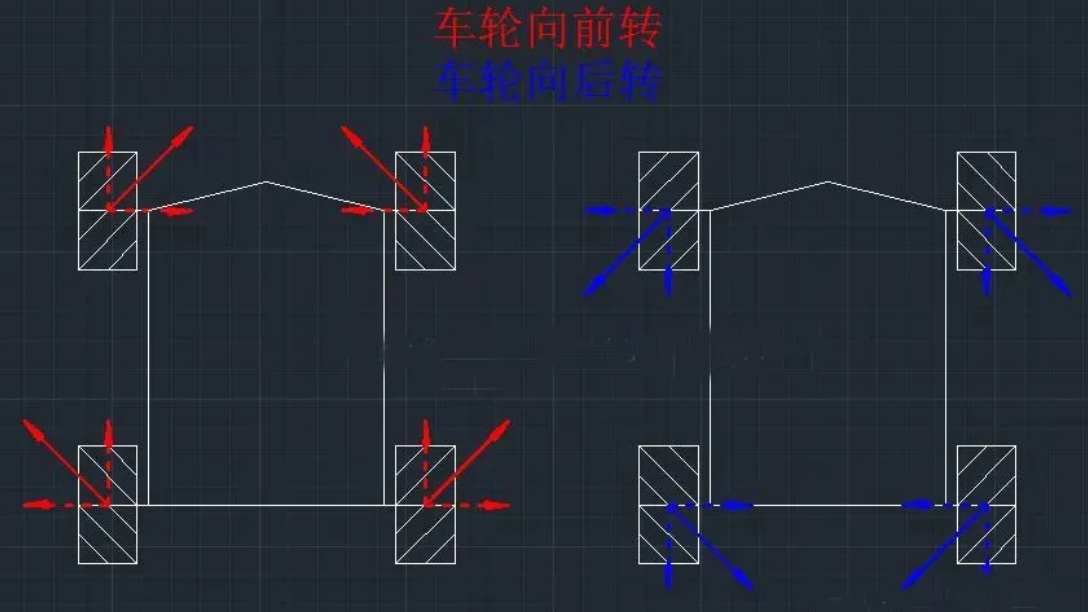
我们可以看到,当四个轮子以相同速度转动时,无论是向前还是向后x轴的分速度都“左右抵消”。
四个轮子可以同时向不同方向转动使得车辆或机器人就能较容易地进行原地旋转。原地旋转功能不仅可以使小车更加灵活,还能增强作品的展示性,岂不是一举多得?
那为什么麦克纳姆轮还是没有内大范围推广使用呢?上述优点是较理想化的,但在实际问题中,限制条件还有不少:
1. 移动速度慢。麦轮实现全向移动的代价是牺牲一部分纵向速度来进行横向移动。此外,麦轮的大部分结构以金属为主,增加了车辆的自重,减慢了移动速度。
2. 传动结构复杂。麦轮的每一个轮子都需要一个单独的动力系统,这意味着使用麦轮的车总共需要四个电机进行驱动,大大增加了车辆的复杂程度,也就更容易发生损坏。
3. 对复杂地形的适应性不强。麦轮的全向移动是在每一个麦轮的滚子单独接触地面时分解速度实现的,也就是说如果在崎岖不平的地面就会造成无法分解速度,从而无法横向移动,所以麦轮对路面要求比较高。
虽然当前麦克纳姆轮只是应用于一些特殊行业,但是凭借它灵活的优势,将来这种全向轮将有可能应用于汽车行业。比如制造出一种以麦克纳姆轮驱动的汽车,或许可以缩小汽车停车位的间隔进而创造出更多的停车位,也能降低因为急转弯而发生的侧翻事故。相信麦克纳姆轮会在未来找到更大的发展空间。


 微信二维码
微信二维码